



Il gruppo Diana del Politecnico di Torino per il Google Lunar X-Prize
di Andrea Di Salvo
L’era spaziale che stiamo vivendo è veramente ricca: ci giungono immagini e dati da Marte grazie ai rover sulla sua superficie, come Curiosity; due anni fa, per la prima volta nella storia, siamo stati in grado di atterrare con successo su una cometa, la 67P/Churyumov-Gerasimenko e di studiarne la superficie; e ancora qualche anno 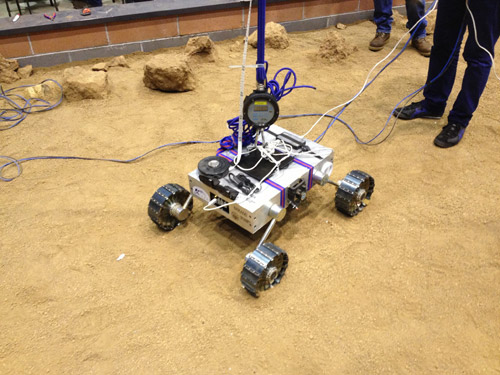 prima, nel 2005, abbiamo fatto lo stesso con Titano, una delle lune di Saturno.
prima, nel 2005, abbiamo fatto lo stesso con Titano, una delle lune di Saturno.
Da poco più di un mese infine, in base al Trattato sullo spazio extra-atmosferico, una compagnia privata, la Moon Express, ha ottenuto dal governo statunitense il permesso di eseguire operazioni all’infuori dell’orbita bassa terrestre. La compagnia partecipa al Google Lunar X-Prize (GLXP): si tratta di una competizione spaziale tra squadre private per mandare sulla Luna un rover in grado di muoversi sulla sua superficie per almeno 500 metri, oltre a inviare immagini, video e dati. Accanto agli aspetti scientifici della gara, procedono di pari passo quelli economici: con lo sviluppo delle tecnologie all’interno della sfida, si intende ridurre i costi e le barriere per l’entrata dell’industria privata nell’esplorazione e nello sfruttamento delle risorse minerarie lunari.
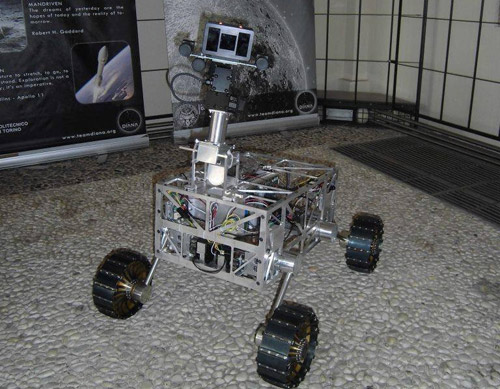
A questa competizione internazionale partecipa anche un gruppo italiano, battezzato Team Italia, con il rover Amalia. Sviluppato dal gruppo Diana del Politecnico di Torino, è il frutto della collaborazione di studenti dell’ateneo di diverse discipline, tra cui naturalmente l’aerospaziale, l’elettronica e le telecomunicazione per citarne alcune.
Vincenzo Comito, 23 anni, studente del Corso di laurea magistrale in Mechatronic Engineering, è entrato nel team durante il suo primo anno al Politecnico torinese, dopo essere rimasto affascinato da una delle prime versioni del rover Amalia. In questi anni la squadra è stata per lui una fonte di soddisfazioni, tra notti passate con i colleghi per costruire un vero robot e continue scoperte.
In quale occasione nasce il Team Diana?
“Il team Italia nasce nel 2008, in occasione del Google Lunar X-Prize ed è composto da quattro università: dal Politecnico di Torino, da quelli di Milano e di Bari e dall’Università La Sapienza di Roma. Il team Diana del Politecnico torinese, in particolare, aveva lo scopo di realizzare il rover in grado di esplorare la superficie lunare e soddisfare i requisiti previsti dalla competizione. Tanti studenti con la passione per lo spazio hanno immediatamente accettato la sfida, proponendo un primo progetto del rover su cui attualmente continuiamo a lavorare, migliorandolo e implementando nuove soluzioni applicabili nel campo della robotica spaziale. Le altre università invece avevano l’incarico di portare avanti le restanti parti della missione, ovvero il launcher, il lander e la mission analysis”.
La realizzazione del rover lunare Amalia è stata la vostra prima sfida: come l’avete affrontata? Su quali competenze avete dovuto contare per il suo sviluppo?
“Per la realizzazione del rover è stato necessario prima di tutto mettere su un team eterogeneo. Realizzare un robot da zero richiede conoscenze e soprattutto esperienze in campi diversi, per cui ogni studente ha dovuto ricoprire un singolo ruolo nelle fasi di design e realizzazione. La prima fase dello sviluppo è stata un lungo brainstorming: ad ogni riunione veniva abbozzata e discussa una nuova versione del rover che potesse rispondere a tutte le specifiche richieste. È una fase molto interessante per ogni studente in quanto lo fa entrare nel mondo della ricerca e delle pubblicazioni accademiche, nell’obiettivo di acquisire nuove tecniche e nozioni. Una volta fissate le caratteristiche principali del rover, il team è passato alla fase di progettazione dello stesso: gli studenti hanno realizzato i cad dei componenti meccanici, i progetti delle board elettroniche e i sistemi di simulazione e controllo”.
 In che modo siete stati supportati dal Politecnico, a livello tecnico ed economico?
In che modo siete stati supportati dal Politecnico, a livello tecnico ed economico?
“Il professor Genta del Dipartimento di Ingegneria Meccanica e Aerospaziale, il Dimeas, insieme ad altri professori di vari dipartimenti, offre la propria consulenza durante tutte le fasi del progetto, lasciando comunque ampia libertà riguardo alle idee e ai sistemi utilizzati in linea con uno degli scopi principali del progetto: permettere agli studenti di ideare e studiare nuove soluzioni o proporre approcci standard. Il progetto è finanziato dal Politecnico tramite i fondi destinati alla Progettualità Studentesca. Il Centro Ricerche Fca ha inoltre finanziato progetti di ricerca collegati al rover”.
Come è stato realizzato tecnicamente il rover e che cosa può fare? Avrete eseguito dei test in un ambiente simulato immagino.
“Il rover, attualmente alla sua terza versione, ha due caratteristiche principali: il sistema mobility, studiato per avanzare sull’accidentato terreno lunare con la capacità di superare ostacoli, e il payload visivo, che oltre a scattare immagini in alta definizione permette al rover di avere un certo grado di autonomia. La navigazione autonoma viene continuamente sviluppata, con l’intento di rendere superfluo il controllo dell’operatore umano. Il rover è stato testato nel Moon Mars Terrain Demonstrator dell’Altec, un’area sperimentale che simula il terreno della Luna e di Marte. Le prove sono state effettuate anche diminuendo il peso del rover tramite un cavo, in modo da simularne in modo realistico il comportamento sul terreno con la gravità lunare”.
A settembre vi sarà la European Rover Challenge e voi vi presenterete con un altro rover, T0-R0. Che cos’è e come vi state preparando all’evento?
“Purtroppo abbiamo dovuto rimandare la gara all’anno prossimo. In parte a causa dei ritardi durante la fase di progettazione, in parte a causa del lungo iter burocratico legato all’acquisto di ogni componente. Il nuovo obiettivo per noi diventa ERC 2017. Si tratta comunque di una competizione con obiettivi analoghi a quelli di Amanda: dovremo sviluppare un rover per una missione marziana che sia in grado di compiere diverse operazioni, tra cui afferrare oggetti e trasportarli da un posto a un altro, manipolare bottoni e interruttori, tracciare la propria posizione grazie alla visione stereo e raggiungere la velocità di 3 chilometri orari su due tipi di terreno, roccioso e sabbioso”.
 Il lavoro del gruppo può essere tradotto nella forma più accademica di uno stage o di una tesi?
Il lavoro del gruppo può essere tradotto nella forma più accademica di uno stage o di una tesi?
“Sì, accade spesso appunto che i nostri studenti, lavorando intensamente su un particolare sistema del rover, sviluppino la loro tesi di laurea su quanto fatto. Ad esempio, sono stati oggetto di tesi di laurea il sistema di controllo delle sospensioni attive del rover, il progetto delle ruote elastiche e della scheda elettronica principale, il backplane (scheda di connessione, ndr). Inoltre alcuni studenti hanno effettuato degli stage presso aziende con cui collaboriamo, come l’Altec o MSC”.
Una delle difficoltà accademiche è tradurre slide e dispense in dispositivi concreti: quanto contribuisce l’esperienza del gruppo al futuro professionale dei suoi membri?
“Tantissimo. Lo sviluppo viene portato avanti come in un’azienda: ci sono specifiche, costi, compromessi, esperimenti e rischi. Ogni studente durante la progettazione affronta problemi reali che impattano sulla realizzazione di ogni prodotto ingegneristico. Tutto questo avviene grazie agli strumenti appresi a lezione, questa volta destinati a scopi ben più interessanti di quelli degli esercizi teorici. Spesso lo studente che esce dal team, una volta concluso il suo percorso accademico – o, come accade spesso, anche prima – esibisce durante i colloqui il lavoro svolto. Non è una sorpresa che molti ex-membri del team oggi lavorino in diverse aziende nel campo aerospaziale”.